Homing SFC 範例
此範例為 3 軸回歸機械原點的SFC 。可以與 Servo On/OFF SFC 配合將所有對應的馬達驅動器切換到 Operation Enabled 的狀態, 也可以手動將驅動器切換到 Operation Enabled 以進行此 SFC 的運作。
此範例設計為兩個優先順序的運動軸回歸機械原點,可以完成以下兩種應用:
- 將運動軸分配為兩個優先順序回歸機械原點。例如先完成 Z 軸後再進行 X,Y軸。
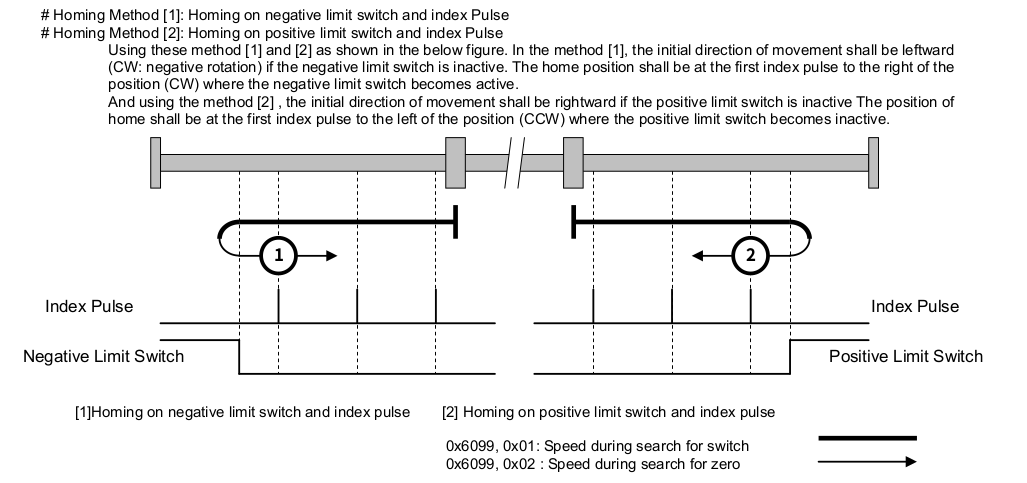
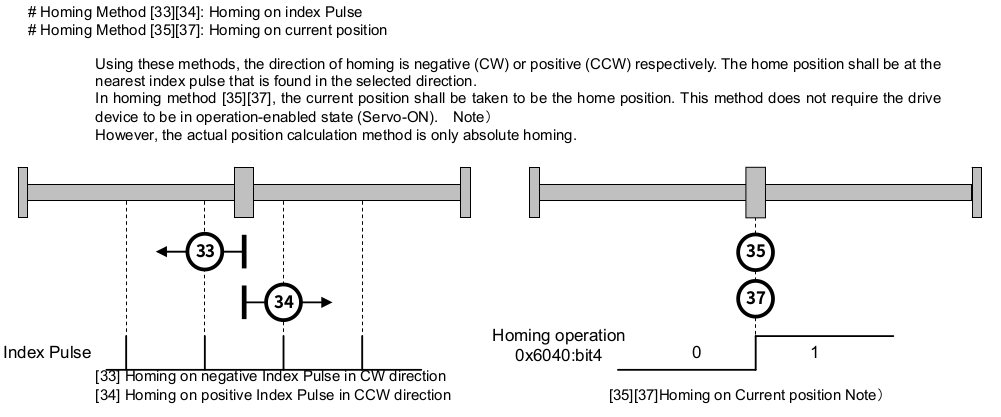
- 結合兩種回歸機械原點的方法,快速找到準確的機械原點。譬如先使用速度較高的 homing method 1 或是 2 找到 encoder index 大致的地方,再使用 homing method 33 或是 34 搭配較低的速度找到精確的 encoder index 。
以下是節錄 SANMOTION EtherCAT 驅動器 Instruction Manual 中對於 homing method 1, 2, 33 與 34 的說明:
SFC 設計流程如下:
+-------------+
| Init | 檢查是否對應的驅動器裝置,
| | 設定 device-ok? 旗標。
+-----+-------+
|
device-ok?
|
+-----v-------+
| Idle | 等待 homing-accepted? 為真。
+--------+ |
| +-----+-------+
| |
| homing-accepted?
| |
| +-----v-------+
| | Config | 切換對應驅動器為 HM 模式
| | | 設定 homing speed, homing method
| +-----+-------+
| |
| config-ok? 等待 config 設定指令(EtherCAT SDO)完成。
| |
| +-----v-------+
| | Trigger | 啟動驅動器開始進行回歸原點動作。(EtherCAT PDO)
| | |
| +-----+-------+
| | 等待 50 ms 後,才開始檢查回歸原點的結果。
| trigger-ok? 避免驅動器還未開始回歸原點,檢查到錯誤時機的狀態。
| |
| +-----v-------+ 檢查驅動器狀態,判斷回歸原點是否完成。
| | Loop | 如果所設定的運動軸都完成回歸原點就設定 loop-stopped? 旗標。
| | |
| +-----+-------+
| |
| loop-stopped?
| |
| +-----v-------+ 將目前佇列中的運動軸切換到 CSP mode
| | Post Action | 切換到下一個回歸機械原點佇列,
| | | 如果所有佇列都已經完成,就將 homing-accepted? 設定為 false。
| +-----+-------+
| |
| post-action-ok?
| |
+------<-------+
SFC 實作:
\ Axes Description
\ 分別為第 1, 2 , 3 運動軸
\ 不使用 index 0 的運動軸
3 constant axes-len
create axes 0 , 1 , 2 , 3 ,
\ 使用 axes-enabled 可以暫時將指定軸排除在此 SFC 的運作邏輯之外
create axes-enabled false , true , true , true ,
\ 取得受控運動軸清單中的軸編號
: axis@ ( index -- axis-no )
cells axes + @
;
\ 取得受控運動軸清單中的致能狀態 (enabled/disabled)
: axis-enabled? ( index -- flag )
cells axes-enabled + @
;
\ 將運動軸清單中的運動軸致能
: +axis ( index -- )
cells axes-enabled + true swap !
;
\ 將運動軸清單中的運動軸禁能
: -axis ( index -- )
cells axes-enabled + false swap !
;
\ 定義回歸機械原點的運動軸 (enabled/disbaled)
\ 分為兩個優先順序,first-homing-axes 執行完後,才執行 second-homing-axes
create first-homing-axes false , false , false , false ,
create second-homing-axes false , false , false , false ,
\ 回歸機械原點的速度與方法
\ 速度單位參考驅動器 0x6099 定義的單位,通常是 pulses/sec
create axes-homing-v1 0 , 1000 , 1000 , 1000 ,
create axes-homing-v2 0 , 10 , 10 , 10 ,
\ 要參照驅動器有支援的方法,通常同一個代號會是相同的方法,但不是每一種驅動器都有支援。
create axes-homing-method 0 , 33 , 33 , 33 ,
\ 取得 homing-v1 參數
: axis-homing-v1@ ( index -- v1 )
cells axes-homing-v1 + @
;
\ 取得 homing-v2 參數
: axis-homing-v2@ ( index -- v2 )
cells axes-homing-v2 + @
;
\ 取得 homing-method 參數
: axis-homing-method@ ( index -- method )
cells axes-homing-method + @
;
\ 設定 homing-v1 參數
: axis-homing-v1! ( v1 index -- )
cells axes-homing-v1 + !
;
\ 設定 homing-v2 參數
: axis-homing-v2! ( v2 index -- )
cells axes-homing-v2 + !
;
\ 設定 homing-method 參數
: axis-homing-method! ( method index -- )
cells axes-homing-method + !
;
\ 目前處理的 homing-priority
\ 1 表示處理 first-homing-axes 中啟動的運動軸
\ 2 表示處理 second-homing-axes 中啟動的運動軸
variable homing-priority
\ 在對應的優先佇列內啟動要回歸機械原點的運動軸
: +homing-axis ( index priority -- )
case
1 of cells first-homing-axes + true swap ! endof
2 of cells second-homing-axes + true swap ! endof
." log|Invalid homing priority" cr
swap drop
endcase
;
\ 在對應的優先佇列內取消要回歸機械原點的運動軸
: -homing-axis ( index priority -- )
case
1 of cells first-homing-axes + false swap ! endof
2 of cells second-homing-axes + false swap ! endof
." log|Invalid homing priority" cr
swap drop
endcase
;
\ 在對應的優先佇列內,取得該運動軸是否要回歸機械原點?
: homing-axis? ( index priority -- flag )
case
1 of cells first-homing-axes + @ endof
2 of cells second-homing-axes + @ endof
." log|Invalid homing priority" cr
swap drop false swap
endcase
;
\ 定義 Axes Homing 流程中所需要的變數
variable homing-devices-ok
variable axes-homing-accetped
variable homing-config-once
variable homing-trigger-once
variable homing-loop-stopped
variable homing-post-action-once
variable axes-homing-stopping
\ 啟動 axes homing
\ 使用此指令,決定是否要開始進行回歸機械原點的活動
\ 依據不同的應用調整啟動的條件
: start-axes-homing ( -- )
homing-priority @ 0= if
true axes-homing-accetped !
1 homing-priority !
else
." log|Axes homing not accetped" cr
then
;
\ 停止 axes homing
\ Homing 執行中要停止的命令,會將對應的驅動器切換到 Quick Stop Activate 的狀態
: stop-axes-homing ( -- )
homing-priority @ 0<> if
1
begin
dup axes-len <=
while
dup axis-enabled? over homing-priority @ homing-axis? and if
dup axis@ axis-drive@ drive-stop
then
1+
repeat
drop
true axes-homing-stopping !
then
;
\ Homing Init Step
\ 檢查對應的硬體裝置是否存在,只在一開始的時候做一次,如果檢查沒有通過,SFC 會停留在這個 step。
variable homing-init-once
: homing-init ( -- )
homing-init-once @ not if
true homing-devices-ok !
1
begin
dup axes-len <=
while
dup axis-enabled? over axis@ virtual-axis? and if
." error|Axis (" dup axis@ 0 .r ." ) is virtual axis" cr
false homing-devices-ok !
then
1+
repeat
drop
true homing-init-once !
then
;
\ Homing Idle Step
\ 在此狀態等待 axes-homing-accetped 為真
: homing-idle ( -- )
;
\ Homing Config Step
\ 依據優先佇列設定回歸機械原點的參數給驅動器
: homing-config
homing-config-once @ not if
1
begin
dup axes-len <=
while
dup axis-enabled? over homing-priority @ homing-axis? and if
dup axis@
over axis-homing-v1@ over axis-drive@ homing-v1!
over axis-homing-v2@ over axis-drive@ homing-v2!
over axis-homing-method@ over axis-drive@ homing-method!
hm swap axis-drive@ op-mode!
then
1+
repeat
drop
false homing-trigger-once !
false homing-post-action-once !
true homing-config-once !
then
;
\ Homing Trigger Step
\ 依據優先佇列設定,命令驅動器開始回歸機械原點
: homing-trigger
homing-trigger-once @ not if
1
begin
dup axes-len <=
while
dup axis-enabled? over homing-priority @ homing-axis? and if
dup axis@ dup axis-drive@ drive-on? if
axis-drive@ go
else
drop
then
then
1+
repeat
drop
false homing-config-once !
true homing-trigger-once !
then
;
\ Homing Loop Step
\ 依據驅動器狀態判定回歸機械原點結果
\ 依據結果設定運動軸狀態
: homing-loop
true homing-loop-stopped !
1
begin
dup axes-len <=
while
dup axis-enabled? over homing-priority @ homing-axis? and if
dup axis@ dup axis-drive@ target-reached? if
dup axis-drive@ drive-sw@ $1000 and 0<> if
dup ." log|Axis (" 0 .r ." ) homing attained" cr
dup +homed
else
dup ." log|Axis (" 0 .r ." ) homing error" cr
\ 如果回歸機械原點失敗,停止所有運動軸回歸機械原點
stop-axes-homing
dup -homed
then
else
false homing-loop-stopped !
then
\ 如果驅動器不是在 Operation Enabled 狀態,停止所有運動軸回歸機械原點
dup axis-drive@ drive-on? not if
stop-axes-homing
true homing-loop-stopped !
then
\ 清除運動軸落後誤差,依實際位置修正命令
0axis-ferr
then
1+
repeat
drop
;
\ Homing Post Action
\ 將目前佇列中的驅動器換到 CSP 模式
\ 清除目前佇列中的運動軸
\ 判斷是否要切換到下一個佇列或是停止回歸機械原點
: homing-post-action
homing-post-action-once @ not if
1
begin
dup axes-len <=
while
dup axis-enabled? over homing-priority @ homing-axis? and if
dup axis@ csp swap axis-drive@ op-mode!
then
dup homing-priority @ -homing-axis
1+
repeat
drop
homing-priority @ 2 >= axes-homing-stopping @ or if
0 homing-priority !
false axes-homing-accetped !
false axes-homing-stopping !
." log|homing stopped or finished" cr
else
homing-priority @ 1 + homing-priority !
then
true homing-post-action-once !
then
;
\ 對應的裝置檢查是否通過 ?
: homing-devices-ok? ( -- flag )
homing-devices-ok @
;
\ 是否接受 homing 的指令 ?
: axes-homing-accetped?
axes-homing-accetped @
;
\ Homing 指令是否設定完成 ?
\ 檢查 EtherCAT SDO 只否都已經執行完畢。
: homing-config-ok?
waiting-requests? not
;
\ 在 Homing trigger 後等待 50 ms
: homing-trigger-ok?
['] homing-trigger elapsed 50 >
;
\ 是否要脫離 Homing Loop ?
: homing-loop-stopped?
homing-loop-stopped @
;
\ Homing Post Action 是否完成?
\ 檢查 EtherCAT SDO 只否都已經執行完畢。
: homing-post-action-ok?
waiting-requests? not
;
\ 宣告 SFC Step
step homing-init
step homing-idle
step homing-config
step homing-trigger
step homing-loop
step homing-post-action
\ 宣告 SFC Transition
transition homing-devices-ok?
transition axes-homing-accetped?
transition homing-config-ok?
transition homing-trigger-ok?
transition homing-loop-stopped?
transition homing-post-action-ok?
\ Link SFC
' homing-init ' homing-devices-ok? -->
' homing-devices-ok? ' homing-idle -->
' homing-idle ' axes-homing-accetped? -->
' axes-homing-accetped? ' homing-config -->
' homing-config ' homing-config-ok? -->
' homing-config-ok? ' homing-trigger -->
' homing-trigger ' homing-trigger-ok? -->
' homing-trigger-ok? ' homing-loop -->
' homing-loop ' homing-loop-stopped? -->
' homing-loop-stopped? ' homing-post-action -->
' homing-post-action ' homing-post-action-ok? -->
' homing-post-action-ok? ' homing-idle -->
\ Activate homing-init step
' homing-init +step